

Dear readers, First of all, we wish you a happy new year, full of nice moments and health! It has been a while since we shared something with you on the blog, so it is about time to give you some news. In Villach (Austria), where all four of us bloggers did out Master’s degree,...
Continue reading...


Hello there, it was a rough month this April 2018. 1. Despite all efforts we could not prevent our Biomimetics course from death… It is cancelled! No more biomimetics at the Carinthian University of Applied Sciences. I am sad and angry and I still think it was not fair. In the end it is just...
Continue reading...
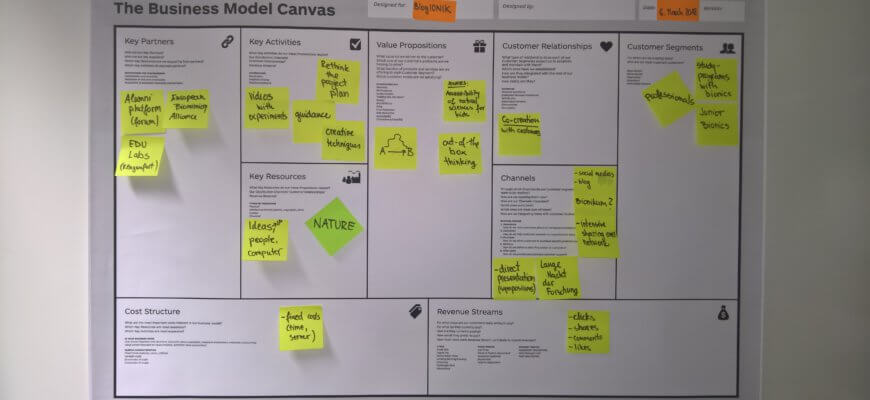
Dear readers, After several weeks/months without a new article I should give you a small update. We are working on it! We are developing concepts and will start soon to share them with you. We will need your feedback. A new platform for graduated Biomimicry- and Biomimetics- adopters is in development. A new regional organisation...
Continue reading...


Dear BlogIONIK readers, Merry Christmas and a happy new year 2018! We hope you will have a relaxing vacation, wonderful days with your families and friends, maybe some snow to do a little bit of winter sports and of course all the best for the upcoming year! For us, the new year will...
Continue reading...

Dear readers, my last article was published at the end of July. At that time, it was highly uncertain what will happen with the subject of Biomimetics in Austria, especially in Villach. The weeks went further along and a lot of work was done. Today you get again an overview about the current state of...
Continue reading...

Have you ever asked yourself how it is possible for migrating birds to be able to fly over such long distances in order to spend one part of the year in a more favourable environment? You have probably already seen swarms of birds flying away in a V-shaped formation, which for sure has an advantage...
Continue reading...

Flying has been man’s fantasy for ages, attempts we made as early as late 1800’s. Otto Lilienthal of Germany was the first one with a successful glider flight in the 1890. In the previous articles for this theme session we have read about the dynamic soaring, gliding. Today I would like to discuss some unusual...
Continue reading...
In the course of evolution animals developed diverse and sophisticated ways to fly. The way how they succeed in flying strongly depends on several factors. How big is the animal? How big are its wings and how is their shape? Which distances does the animal need to cover? And how much energy can it spend...
Continue reading...

Flying is something that has been occupying the human’s mind since always. That is why we think it is an appropriate and interesting theme for our next monthly session. Numerous legends tell stories about people using birdlike wings and trying to fly by jumping from a cliff. The Greek legend of Daedalus and Icarus is...
Continue reading...